|
Mass Mould
|
II've programmed a number of de-mould applications,which are always fun to do. The first time you let the robot and moulding machine run together in full auto is always a heart in the mouth moment, as any mistakes would be very expensive. Thankfully I've never got it wrong, good simulation and careful testing are the key here. This was my first de-mould application using mitsubishi robot.
The application for Mass mould used an RV-6SL to de-mould lids and place them on a transport pallet. The pallet travels down the production line through a heating cell (not shown) to the second robot, an RH-6S. This robot inserts foam wads into the lids. The pallet leaves the wad cell to the subsequent stations which close the lid, inspect the product and offload it from the pallet.
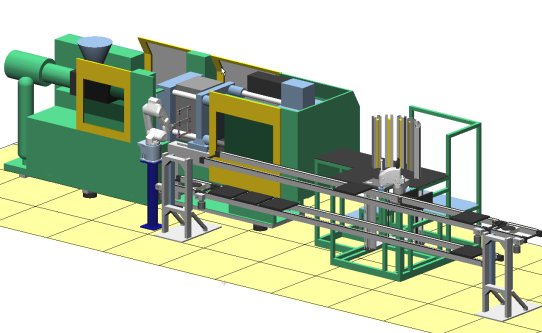
The simulation is one of the most sophisticated that I've created to date, containing 3 separate systems.
- The Moulding Machine used a simulation program written in IRL to control the movement of the simulation model and replicated the euromap interface to the robot.
- The De-Mound Robot had 3 distinct programs written in MELFA Basic 4. These handled the interface to the HMI, moulding machine and robot motion.
- Wad Robot had a single program which controlled the motion of the robot.
Click here to watch the full cell simulation. To see the real machine in action click here for the de-mould robot and click here for the wad robot.