|
Robot Simulation on PCs
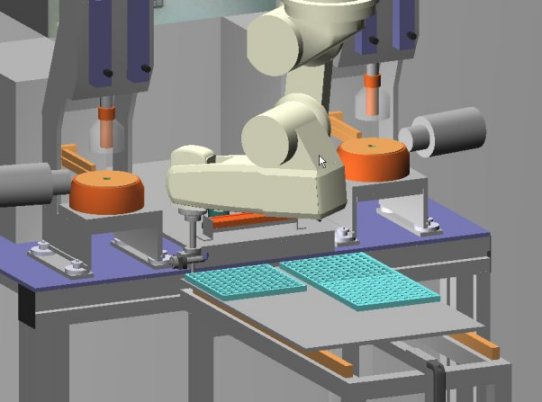
COSIMIR is the leading 3D robot simulation system for the Windows platform. You can use COSIMIR to plan workcells, to check the reachability of all positions and to optimize the work cell layout. All movements and handling operations can be simulated to avoid collisions and to optimize cycle times. The download of tested programs and positions into the robot controller is supported.
Simulating Work Cells
COSIMIR supports the simulation of entire workcells. This means that not only robot motion, but also the interaction of the robot with the environment (e.g. gripper and transport actions) is realistically simulated. All electrical connections between real work cell components can be mapped to I/O-connections of the simulated components for a comprehensive simulation. For example the connection of a digital output of the robot controller with the input of the gripper is sufficient to open and close the gripper by means of output signals in the robot program. A simulated gripper will automatically close its jaws and grip the object located between the gripper jaws when the appropriate input is set. This correspondence between simulation and reality allows the direct transfer of robot programs into the robot controller.
Programming with Robot Controller Languages
The robot programs developed in simulation can directly be transferred to the robot controller. This can be achieved by means of a floppy disk, or by using standard interfaces like RS-232 .
|